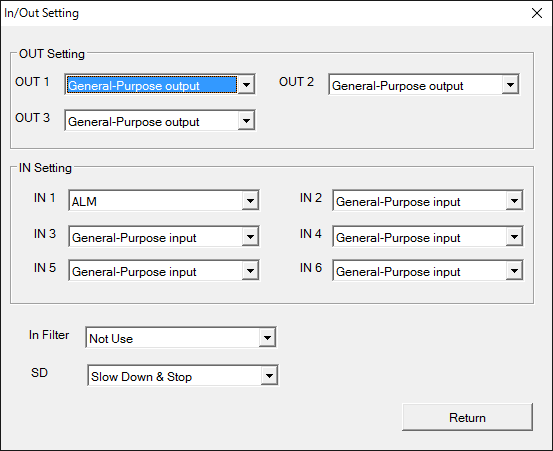
出力3点、入力7点の入出力を設定します。
設定が完了したら、[Return]ボタンを押してください。Setting画面に戻ります。
初期設定関数( SmcWSetCtrlTypeOut SmcWSetCtrlTypeIn SmcWSetInFilterType SmcWSetSDMode )
・OUT Setting(出力を設定します) SmcWSetCtrlTypeOut関数
General-Purpose output(汎用出力信号)
Alarm Clear(アラームクリア信号)
Counter Clear (ERC)(偏差カウンタクリア信号)
OutPulse Count Match(CP1)(出力パルスカウンタカウント一致信号)
Encoder Count Match(CP2)(エンコーダカウンタカウント一致信号)
Hold OFF(ホールドオフ信号)
・IN Setting(入力を設定します) SmcWSetCtrlTypeIn関数
General-Purpose input(汎用入力信号)として使用
ALM(アラーム信号入力)として使用
INP(サーボドライバの位置決め完了信号入力)として使用
SD(減速(減速停止)信号入力)として使用
LTC信号入力として使用(COUNTER1~2(SMC-4DF/SMC-8DF シリーズ では1~4)の値をラッチします。)
PCS信号入力として使用(この信号入力で位置決め動作を開始します。(目標位置のオーバーライド2用))
CLR信号入力として使用(COUNTER1~4の内、指定したカウンタをリセットします。SMC-4DL/SMC-8DL シリーズ ではIN6固定。CLR信号設定不可)
・In Filter(±LIM、SD、ORG、ALM、INPの入力フィルタを設定します。) SmcWSetInFilterType関数
フィルタを挿入しない
3.2[μsec]
25[μsec]
200[μsec]
1.6[msec]
・SD Mode(SD信号入力時の動作を設定します。) SmcWSetSDMode関数
減速停止
減速のみ(開始速度で定速動作します)