
■目次
■使用関数
・初期設定関数( SmcWSetPulseType SmcWSetEncType )
■概要
初期設定関数を使用して初期設定を行います。
■使用方法
・デバイスネームと設定する軸をAxisNo(軸番号)で選択します。
・PulseOut (出力パルスの設定)
PulseType
(パルス出力モードを設定します。) SmcWSetPulseType関数
ここで表示されるPulseTypeの並び順は、引数:PulseMode の並び順で表示しています。
共通パルス方式 OUT:負論理,DIR+:High,DIR-:Low
共通パルス方式 OUT:正論理,DIR+:High,DIR-:Low
共通パルス方式 OUT:負論理,DIR+:Low,DIR-:High
共通パルス方式 OUT:正論理,DIR+:Low,DIR-:High
2パルス方式 :負論理
2パルス方式 :正論理
90度位相差モード OUT:進み信号. DIR:遅れ信号
90度位相差モード OUT:遅れ信号. DIR:進み信号
Reverse Direction Timer ON
共通パルス方式設定時、DIR変化の変化によって方向が変化する際に200[μsec]のウェイト(遅延)を
パルス出力前に挿入します。(共通パルス方式の場合のみ有効)
S Accel/Decel Use(S字加減速の使用有無を設定します。)
・PulseIn (エンコーダ入力パルスの設定)
Encoder
Type (エンコーダタイプ) SmcWSetEncType関数
A/B 1逓倍
A/B 2逓倍
A/B 4逓倍
U/D
・設定が有効でない場合は、コメントに、戻り値が表示されますので、エラーの内容とその対応を確認してから、再度実行してください。
・設定をデバイスに反映させる場合は、[Set]を押してください。
・初期設定の完了を確かめるには、[Status]を押してください。
・本プログラムを終了する場合は、[Exit]を押してください。
■使用関数
・初期設定関数( SmcWSetCtrlTypeOut SmcWSetCtrlTypeIn SmcWSetInFilterType SmcWSetSDMode )
■概要
出力3点、入力7点の入出力を設定します。
■使用方法
・OUT Setting (出力を設定します) SmcWSetCtrlTypeOut関数
General-Purpose output (汎用出力)
Alarm Clear (アラームクリア信号)
Counter Clear (ERC) (偏差カウンタクリア信号)
OutPulse Count Match (CP1) (出力パルスカウンタカウント一致信号)
Encoder Count Match (CP2) (エンコーダカウンタカウント一致信号)
Hold OFF (ホールドオフ信号)
・IN Setting(入力を設定します) SmcWSetCtrlTypeIn関数
General-Purpose input(汎用入力)として使用
ALM(アラーム信号入力)として使用
INP(サーボドライバの位置決め完了信号入力)として使用
SD(減速(減速停止)信号入力)として使用
LTC信号入力として使用(COUNTER1~2(SMC-4/8DF
シリーズ では1~4)の値をラッチします。)
PCS信号入力として使用(この信号入力で位置決め動作を開始します。(目標位置のオーバーライド2用))
CLR信号入力として使用(COUNTER1~4の内、指定したカウンタをリセットします。SMC-2/4/8DL
シリーズ ではIN6固定。CLR信号設定不可)
・In Filter(±LIM、SD、ORG、ALM、INPの入力フィルタを設定します。) SmcWSetInFilterType関数
フィルタを挿入しない
3.2[μsec]
25[μsec]
200[μsec]
1.6[msec]
・SD Mode(SD信号入力時の動作を設定します。) SmcWSetSDMode関数
減速停止
減速のみ(開始速度で定速動作します)
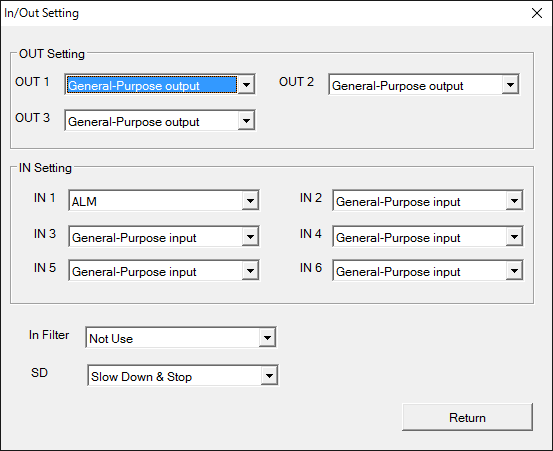
・設定が完了したら、[Return]を押してください。Setting画面に戻ります。
■使用関数
・初期設定関数( SmcWSetCtrlInOutLog )
■概要
初期設定関数を使用して入出力信号の論理(正論理/負論理)の設定を行います。
■使用方法
・OutLogic(出力信号の論理を設定します。) SmcWSetCtrlInOutLog関数
High Active(正論理)
Low Active(負論理)
・In Logic(入力信号の論理を設定します。) SmcWSetCtrlInOutLog関数
High Active(正論理)
Low Active(負論理)
・Limit Logic(リミット信号の論理を設定します。) SmcWSetCtrlInOutLog関数
High Active(正論理)
Low Active(負論理)
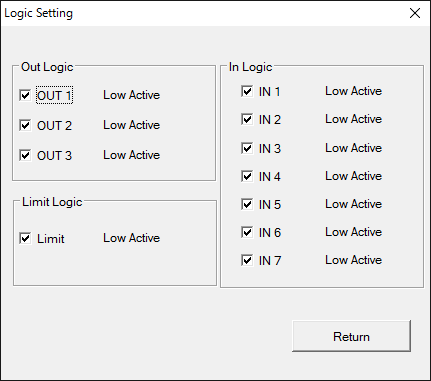
・設定が完了したら、[Return]を押してください。Setting画面に戻ります。
■使用関数
・初期設定関数( SmcWSetOrgMode SmcWSetOrgLog )
■概要
初期設定関数を使用して、原点復帰動作の設定を行います。
■使用方法
・ORG Type SmcWSetOrgMode関数
Z USE(Z相の使用有無を設定します。)
Z Count(原点復帰時のZ相の数を設定します。)
(設定範囲 1~16)
Z USEで「使用しない(チェックなし)」を選択した場合は、無効となります。
EndDirType(原点復帰時の原点突入方向を設定します。)
Disable(指定しない)
Plus Dir(正方向)
Minus Dir(負方向)
・ORG Logic(ORGで使用する信号の論理を設定します。) SmcWSetOrgLog関数
ORG信号の、正論理/負論理を設定します。
Z信号の、立下り/立上りエッジ論理設定をします。
・LimitTurn Use(リミット反転の有無を設定します。)SmcWSetOrgMode関数
リミット反転しない
リミット反転する
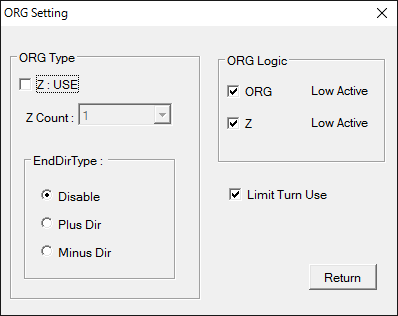
・設定が完了したら、[Return]を押してください。Setting画面に戻ります。
5.ERC/ALM Clear Setting(クリア信号幅設定)
■使用関数
・初期設定関数 ( SmcWSetErcAlmClearTime SmcWSetErcMode )
■概要
初期設定関数を使用してクリア信号の幅等を設定します。
■使用方法
・Counter Clear(ERC)
Stop by LIM and ALM input
0 : LIM、ALM信号入力による停止時にERC信号を出力しない
1 : LIM、ALM信号入力による停止時にERC信号を自動出力
ORG motion end
0 : 原点復帰動作完了時にERC信号を出力しない
1 : 原点復帰動作完了時にERC信号を自動出力
・Counter Clear Time(偏差カウンタクリア信号幅を設定します)
12[μsec]
102[μsec]
408[μsec]
1.6[msec]
13[msec]
52[msec]
104[msec]
レベル出力
・Counter Off Timer(偏差カウンタクリア信号OFFタイマ時間を設定します。)
0[μsec]
12[μsec]
1.6[msec]
104[msec]
・Alarm Clear Time(アラームクリア信号幅を設定します。)
12[μsec]
102[μsec]
408[μsec]
1.6[msec]
13[msec]
52[msec]
104[msec]
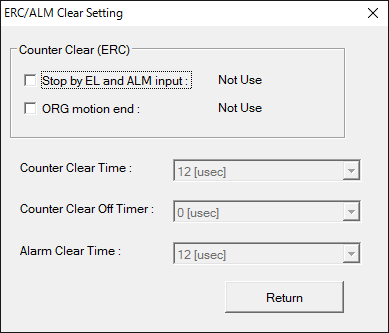
・設定が完了したら、[Return]を押してください。Setting画面に戻ります。
■使用関数
・初期設定関数 ( SmcWSetCounterMode )
■概要
初期設定関数を使用してラッチクリアを設定します。
■使用方法
LTC
・Clear Counter
No Clear
Out Pulse
Encoder Pulse
Out & Encoder Pulse
・Latch Counter
No Use
Out Pulse
Encoder Pulse
Out & Encoder Pulse
CLR
・Clera Counter
No CLear
Out Pulse
Encoder Pulse
Out & Encoder Pulse
・Mode
No Use
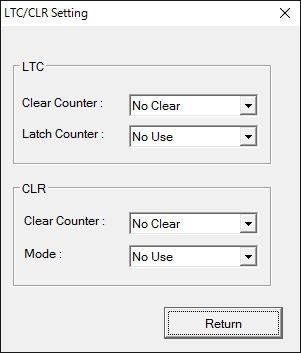
・設定が完了したら、[Return]を押してください。Setting画面に戻ります。