■使用関数
■概要
基本動作設定関数を使用して基本的なモータ動作を行います。
ステータスを取得するサンプルプログラムStatusと同時に実行することにより、モータおよびボードの状態を監視することが可能です。
■使用方法
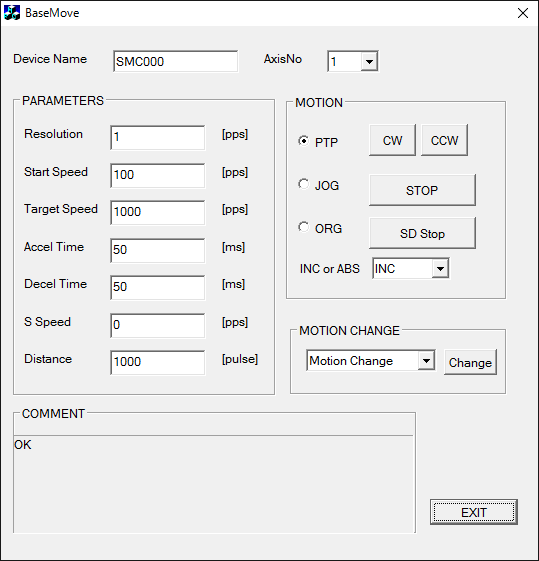
・Device Name(デバイスネーム)とモータの基本動作を行う軸を軸番号(AxisNo)で選択します。
・パラメータ設定でResolution(速度分解能)、Start Speed(開始速度)、Target Speed(目標速度)、Accel Time(加速時間)、Decel Time(減速時間)、S Speed(S字区間)、Distance(移動距離)を設定します。
・モータ動作を開始するために、動作の種類を選択します。動作の種類は、PTP動作、JOG動作または原点復帰動作です。
・[CW]または[CCW]を押すと、モータ動作が開始します。
・モータ動作を停止する場合は、[STOP]を押してください。
・減速停止する場合は、[SDStop]を押してください。
・[INC or ABS]にて、位置の座標タイプを設定します。ABSを選択すると絶対座標になります。INCを選択すると相対座標になります。
・[MOTION CHANGE]からモータ動作変更タイプを選択してください。[Change]をクリックすると選択した動作に変更します。
・設定が有効でない場合は、コメントに、戻り値が表示されますので、エラーの内容とその対応を確認してから、再度実行してください。
・本プログラムを終了する場合は、[EXIT]を押してください。