■使用関数
■概要
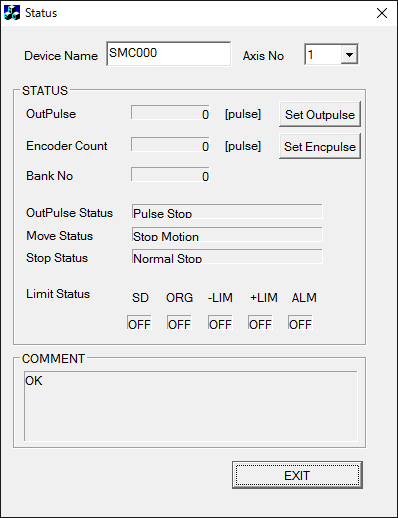
動作ステータス関数を使用して動作ステータスの確認を行います。
■使用方法
・Device Name(デバイスネーム)とモータの動作ステータスを取得する軸を軸番号(AxisNo)で選択します。
・動作ステータスには、Outpulse Count(出力パルス数)、Encoder Count(エンコーダカウント数)、BankNo(バンク番号)、Outpulse Status(パルス出力状態)、Move Status(動作状態)、Stop Status(停止要因)およびLimit Status(リミット状態)があります。
・Outpulse Countをクリアする場合は、[Set Outpulse]を押してください。
・Enccder Countをクリアする場合は、[Set Encpulse]を押してください。
・設定が有効でない場合は、コメントに、戻り値が表示されますので、エラーの内容とその対応を確認してから、再度実行してください。
・本プログラムを終了する場合は、[EXIT]を押してください。