CAN通信、もしくは、CAN FD通信を行うプログラム例です。
サンプル仕様 |
|
プログラム名 |
CanCommunicationCallback |
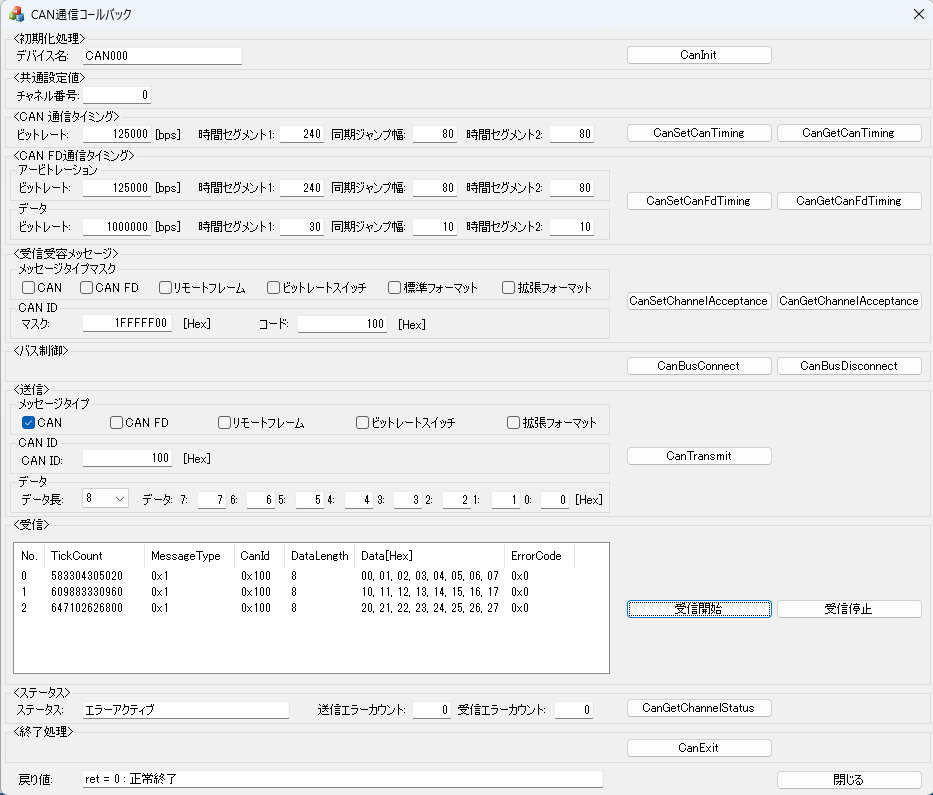
1.希望するプログラム名を指定し、プログラム実行させると、上記のような外観のウィンドウが表示されます。
ソフトウェアのバージョンによっては外観が異なることがあります。
2.デバイス初期化処理
・デバイス名に、デバイスマネージャーで設定したデバイス名を指定し、[CanInit]ボタンを押します。
指定デバイスの利用開始することをデバイスドライバへ通知します。
3.CAN通信、もしくはCAN FD通信のタイミング設定
・CAN通信を行う場合
<CAN通信タイミング>欄で希望する入ビットレート、時間セグメント、同期ジャンプ幅、時間セグメント2を指定し、[CanSetCanTiming]ボタンを押します。
[CanGetCanTiming]ボタンを押すと、デバイスに設定済の値を読込めます。
・CAN FD通信を行う場合
<CAN FD通信タイミング>欄で希望する入ビットレート、時間セグメント、同期ジャンプ幅、時間セグメント2を指定し、[CanSetCanFdTiming]ボタンを押します。
[CanGetCanFdTiming]ボタンを押すと、デバイスに設定済の値が読込めます。
4.受入れ対象のCAN ID設定
・受入れ対象のメッセージタイプにチェックボックスを有効にします。
受入れ対象のCAN IDのフィルタ値を16進数で、マスク欄に入力します。
受入れ対象のコードのフィルタ値を16進数で、コード欄に入力します。
「CanSetChannelAcceptance]ボタンを押すと、指定したメッセージタイプ、フィルタ値、コードが反映されます。
・「CanGetChannelAcceptance]ボタンを押すと、デバイスに設定済のメッセージタイプ、フィルタ値、コードの値が読込めます。
5.CAN通信の開始・停止
・CAN通信を開始する際は、「CanBusConnect」ボタンを押します。
ドライバ上のCAN受信バッファの内容が、順次<受信>欄に表示されます。
・CAN通信を停止する際は、「CanBusDisconnect」ボタンを押します。
7.CAN通信によるデータ送信
本サンプルは、1つのCANメッセージのみが送信できる仕様となっています。
・<送信>欄内に希望する送信データを設定します。
メッセージタイプ:CAN、CAN FD、リモートフレーム、ビットレートスイッチ、拡張フォーマット
CAN ID:16進数指定。
8.CAN通信のステータス
・<ステータス>欄内の「CanGetChannelStatus」ボタンを押すと、現ステータスが表示更新されます。
・送信エラーカウントや、受信エラーカウントも、表示更新されます。
9.デバイス終了処理
・<終了処理>欄内の「CanExit」ボタンを押すと、現デバイス利用が完了したことデバイスドライバへ通知します。
プログラムを終了させることなく、異なるデバイス(例:CAN001など)からCAN通信を開始できます。
再び、CAN通信処理を行う場合は、新たなデバイス名を指定の上、[CanInit]ボタンを押し、デバイス初期化処理を行ってください。
10.プログラムの終了処理
・ウィンドウ内の[閉じる]ボタンを押し、プログラムを終了させます。